rm_referee::LaneLineTimeChangeGroupUi Class Reference
#include <time_change_ui.h>
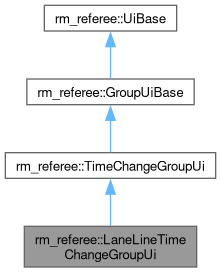
Inheritance diagram for rm_referee::LaneLineTimeChangeGroupUi:
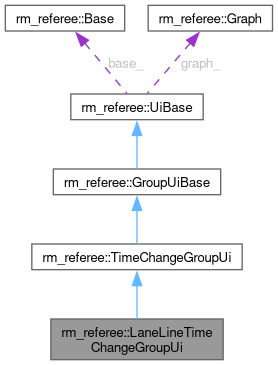
Collaboration diagram for rm_referee::LaneLineTimeChangeGroupUi:
Public Member Functions | |
| LaneLineTimeChangeGroupUi (XmlRpc::XmlRpcValue &rpc_value, Base &base, std::deque< Graph > *graph_queue, std::deque< Graph > *character_queue) | |
| void | updateJointStateData (const sensor_msgs::JointState::ConstPtr data, const ros::Time &time) |
 Public Member Functions inherited from rm_referee::TimeChangeGroupUi Public Member Functions inherited from rm_referee::TimeChangeGroupUi | |
| TimeChangeGroupUi (XmlRpc::XmlRpcValue &rpc_value, Base &base, const std::string &graph_name, std::deque< Graph > *graph_queue, std::deque< Graph > *character_queue) | |
| void | update () override |
| void | updateForQueue () override |
| Public Member Functions inherited from rm_referee::GroupUiBase | |
| GroupUiBase (XmlRpc::XmlRpcValue &rpc_value, Base &base, std::deque< Graph > *graph_queue=nullptr, std::deque< Graph > *character_queue=nullptr) | |
| ~GroupUiBase ()=default | |
| void | add () override |
| void | erasure () override |
| void | addForQueue (int add_times=1) override |
| void | sendUi (const ros::Time &time) override |
| void | sendDoubleGraph (const ros::Time &time, Graph *graph0, Graph *graph1) |
| void | sendFiveGraph (const ros::Time &time, Graph *graph0, Graph *graph1, Graph *graph2, Graph *graph3, Graph *graph4) |
| void | sendSevenGraph (const ros::Time &time, Graph *graph0, Graph *graph1, Graph *graph2, Graph *graph3, Graph *graph4, Graph *graph5, Graph *graph6) |
| void | display (bool check_repeat=true) override |
| void | display (const ros::Time &time) override |
| void | displayTwice (bool check_repeat=true) override |
| Public Member Functions inherited from rm_referee::UiBase | |
| UiBase (XmlRpc::XmlRpcValue &rpc_value, Base &base, std::deque< Graph > *graph_queue=nullptr, std::deque< Graph > *character_queue=nullptr) | |
| ~UiBase ()=default | |
| virtual void | updateManualCmdData (const rm_msgs::ManualToReferee::ConstPtr data) |
| virtual void | updateManualCmdData (const rm_msgs::ManualToReferee::ConstPtr data, const ros::Time &last_get_data_time) |
| void | sendCharacter (const ros::Time &time, Graph *graph) |
| void | sendSingleGraph (const ros::Time &time, Graph *graph) |
| void | sendSerial (const ros::Time &time, int data_len) |
| void | clearTxBuffer () |
| void | display (const ros::Time &time, bool state, bool once=false) |
| void | pack (uint8_t *tx_buffer, uint8_t *data, int cmd_id, int len) const |
Protected Attributes | |
| std::string | reference_frame_ |
| double | robot_radius_ |
| double | robot_height_ |
| double | camera_range_ |
| double | surface_coefficient_ = 0.5 |
| double | pitch_angle_ = 0. |
| double | screen_x_ = 1920 |
| double | screen_y_ = 1080 |
| double | end_point_a_angle_ |
| double | end_point_b_angle_ |
| Protected Attributes inherited from rm_referee::TimeChangeGroupUi | |
| std::string | graph_name_ |
| Protected Attributes inherited from rm_referee::GroupUiBase | |
| std::map< std::string, Graph * > | graph_vector_ |
| std::map< std::string, Graph * > | character_vector_ |
| Protected Attributes inherited from rm_referee::UiBase | |
| Base & | base_ |
| Graph * | graph_ |
| std::deque< Graph > * | graph_queue_ |
| std::deque< Graph > * | character_queue_ |
| tf2_ros::Buffer | tf_buffer_ |
| tf2_ros::TransformListener | tf_listener_ |
| ros::Time | last_send_ |
| ros::Duration | delay_ = ros::Duration(0.) |
| const int | k_frame_length_ = 128 |
| const int | k_header_length_ = 5 |
| const int | k_cmd_id_length_ = 2 |
| const int | k_tail_length_ = 2 |
Additional Inherited Members | |
| Public Attributes inherited from rm_referee::UiBase | |
| uint8_t | tx_buffer_ [127] |
| int | tx_len_ |
| Static Protected Attributes inherited from rm_referee::UiBase | |
| static int | id_ |
Constructor & Destructor Documentation
◆ LaneLineTimeChangeGroupUi()
|
inlineexplicit |
Member Function Documentation
◆ updateJointStateData()
| void rm_referee::LaneLineTimeChangeGroupUi::updateJointStateData | ( | const sensor_msgs::JointState::ConstPtr | data, |
| const ros::Time & | time ) |
Member Data Documentation
◆ camera_range_
|
protected |
◆ end_point_a_angle_
|
protected |
◆ end_point_b_angle_
|
protected |
◆ pitch_angle_
|
protected |
◆ reference_frame_
|
protected |
◆ robot_height_
|
protected |
◆ robot_radius_
|
protected |
◆ screen_x_
|
protected |
◆ screen_y_
|
protected |
◆ surface_coefficient_
|
protected |
The documentation for this class was generated from the following files:
- rm_referee/include/rm_referee/ui/time_change_ui.h
- rm_referee/src/ui/time_change_ui.cpp
Generated by